ME370’s Final Competition—March of the Automata—Fosters MechSE Students’ Creativity, Perseverance, and Teamwork

Nick Rebers exhibits his team's Super Mario walker. Click here for Kate Malmsbury's portfolio of the Super Mario (includes CAD of the automation and decorative painting done by Nick Rebers.)
May 11, 2018
It was noon on Wednesday, May 2nd on Engineering Quad, and the hopes and dreams of a group of Mechanical Science and Engineering (MechSE) students were riding on the little robot they’d built for the ME370 projects course final competition: the March of the Automata. Their motivation? If their team’s automaton won the race, they’d not only have bragging rights, but they’d get a bye on the upcoming final exam.
This year’s race followed in the proud tradition of previous ME 370 robot races. However, while last year’s objective was to successfully span Boneyard Creek via a cable, and for a couple of years before that, it was to drench the professor with a drenching machine, this year’s 31 robots (built along the lines of Imperial Walkers, possibly?) were to race over the less-than-smooth terrain of the Engineering Quad lawn.
There were five heats, and the walkers with the fastest times (and the least interventions), would win their heat and get to move on to compete in the championship race. Regarding the interventions, students were allowed to intervene, say, if their robot was heading off the designated race course, was going to collide with another walker, or had fallen over. However, points were taken off for each intervention.

An ME370 student performs an intervention: he's picking up his walker, which keeps falling over due to the terrain.
Regarding interventions, students were exhorted not to cheat! “I don’t want to see you saying, ‘I have to adjust it. I’m going to pick it up from here, walk over to here, and put it down,’ Van der Zande cautioned. “It’s got to go down in the exact same spot it went up in. This should be obvious, but I have seen it all!”
However, students were only allowed up to 10 interventions. “What if we have to correct it eleven times?” one student asks. “Basically, if you have to correct it that many times, we’ll probably call it a day,” he exhorted. “I’ll say, ‘Don’t go further!’”
He also suggested that they use common sense regarding their racing technique. If their robot cants to the left, they should put it down on the right side, and students didn’t necessarily have to point their robot straight ahead.
According to MechSE Professor Arend van der Zande who, along with Professor Leon Liebenberg, taught the course, ME370 is one of MechSE’s project design classes which “allow students to implement the skills that they’re learning in lecture in a really applied way.”
He goes on to explain that the goal of the “racing of automata” project, is that “they actually have to use mechanisms and linkages and creatively design something that can accomplish a task.” In this case, the task was to go a certain distance, walking with legs, where the legs are the driving mechanism. (Wheels were allowed, but only for balance and not for drive.) Plus, an automaton which simultaneously performed another task was required to be linked to the driving mechanism.
In keeping with his "Play-in-Learning" pedagogy, Liebenberg says he "subjects" all of his students to "some form of play." Therefore for ME 370, he "dreamed up the idea of an automaton," which he thought would be "a perfect vehicle for students to literally 'play' with their ideas."

ME370 instructors Professors Arend van der Zande and Leon Liebenberg compare notes as to which team won the race.
Liebenberg reports that they loved the activity and constructed "extremely creative, low-fidelity prototypes of their automata toys." Using design thinking, his students 1) empathized with the automaton end-users (kids!), 2) defined the problem, 3) ideated possible solutions, 4) prototyped the solutions, then finally 5) constructed and tested their final models. "The models that you saw integrated the automata toys with complex walker mechanisms," he reports.
Also in Liebenberg's section of the course, students also had to construct online design portfolios showcasing their work. "This is another playful way for students to emotionally engage with their subject matter," he explains. (See links below for some of his students' portfolios.)
A common thread among student comments was that they’d done numerous iterations. And while most finished the race, some stalled near the beginning, while others fell over repeatedly. To this reporter’s somewhat snarky wisecrack that some could have used several more iterations, Van der Zande remarks that the degree of difficulty was intentional.

Van der Zande interacts with an ME370 student about his walker.
“That is always the case,” he explains. “This is the challenge with design. If you make something that’s too easy, then it’s not actually a challenge. It’s an exercise. So we have to make something that it is possible to fail.”
Might some of these budding engineers’ GPAs be in jeopardy? “The way that we set things up in terms of the scoring, even if on the race, they only do ok, all through the semester, they’re getting points for doing a good design process,” explains Van der Zande. “So in the end, they’re going to be ok in terms of their grades.”
In the same vein, prior to the race, some of the students were discussing whether they wanted to take the bye for the final. For the team that won, “Effectively they get a perfect score on the final,” Van der Zande says."
Van der Zande shares his favorite part of the class:
“Honestly, it’s the days leading up to the competition. Getting to see all of these projects come together, and seeing them really engage their brains and try to figure out all of the challenges that come up when you take a concept and turn it into a reality. It’s much, much more difficult to make something with your hands than to draw it on a piece of paper or make it in a computer. CAD (computer-aided design) will tell you this thing will work perfectly. But then the moment that you actually build it, all these new things come up. So, getting to see them problem-solve that—I love that part!”
Built into the project, along with the challenges, was a chance to have some fun...after all, these are college students– not yet full-fledged engineers. So teams chose fun names for their robots, with the automaton displaying appropriate actions. Take Todd the Dragon.
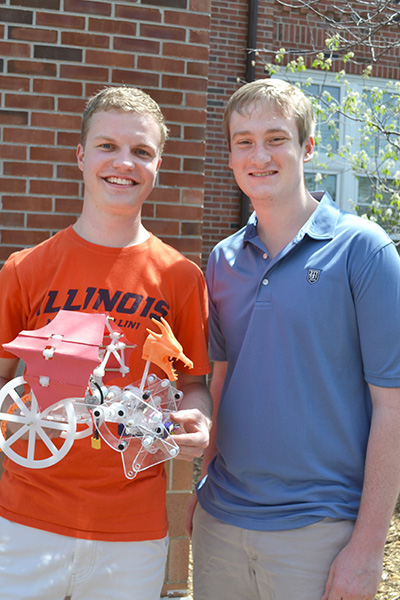
ME370 students Evan Wahl and his teammate Tom Penicook show off their walker, Todd the Dragon.
Todd the Dragon
While the goal of the walker was to go as fast as possible, students also had to have a working automaton on top that automatically moved as the walker did. So Todd had dragon wings which would flap. Plus, it also had a tail which went back and forth, with no aerodynamic impact whatsoever. How’d they come up with the dragon persona? “A few of us like Game of Thrones, so we were thinking of that dragon aspect of it,” reports Evan Wahl, a MechSE junior. (See Evan Wahl's, and John Hutchinson's design portfolios, showcasing their team's work.)
Wahl echoes Van der Zande's comments regarding obstacles his team had to overcome: “It was pretty challenging,” he admits. “We ran into a lot of issues that we didn’t expect to come up while we were making it, because you know, you design something, and it works on paper like it’s going to work really well. It’s like, “How could this not work?” But then you run into things that you never would have thought would have been problems.”
Their biggest issue? Their bevel gears. They had very small teeth and wouldn’t mesh, so the team used a wood shaft which was more flexible. The bulk of Todd’s construction was laser-cut acrylic, with 3D-printed red gears and, of course, a dragon head.
RoboCat
For cat lovers everywhere, there was RoboCat. Yoni Shapiro, junior in MechSE explains that RoboCat had a linkage that represents a cat’s paw which swats at a ball of yarn as the walker moves. While Shapiro says their walker is fast, he acknowledges that “terrain might be an issue.” Being as the racecourse began on sidewalk then transitioned to less-than-golfcourse-smooth grass, there were terrain issues. Regarding any special engineering to help with these issues, he reports, “We did the best that we could,” then expalins that they made a wide base.
Did they expect to win? “We’re gonna’ have fun, and we’re gonna’ do our best,” reports Shapiro, who then cites some added incentive to do well: “If you win, you don’t have to take the final,” he admits. “If you get second place, the final counts for 50%!”
RoboCat teammate Sydney Coker shares a challenge they encountered: “It liked to tip over!” So they added training wheels on the back to help with RoboCat’s stability.
One thing Coker learned about engineering was that “How you design it is not always how it it’s going to work out. You’ve got to tweak it along the way.” Did they do some tweaking? “Lots and lots,” she admits.
U.S.S. Innovation
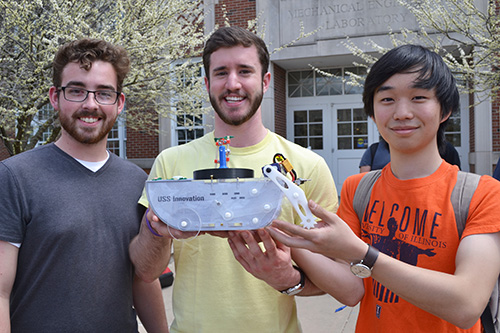
U.S.S. Innovation teammates Tristan Antonsen, Daniel Bumpus, and Daniel Rhyoo.
The fastest walker in one of the heats was the U.S.S. Innovation, designed in the shape of an aircraft carrier with an automaton called the Autopilot, which spins around and tilts up and down.
Evidently the U.S.S. Innovation team encountered lots of complications. MechSE sophomore Daniel Bumpus says, “The most challenging part was last night when it just seemed like pretty much everything broke!” They had a crank break, both gears broke, one of the things on the back of the motor broke. “That actually sheared off,” he divulges, “and we had to re-solder it last night at like 2:00 am, but we’re pretty pleased with how it turned out.”
What did MechSE junior Tristin Antonsen learn about engineering? “Murphy’s law is very much in play here. Pretty much anything that can go wrong will go wrong. And we learned a lot about fatigue in materials, specifically. Uh, things wear out. You can’t just assume everything is perfect.”
Did the team think they were going to win? “I don’t want to jinx it,” says teammate Antonsen, “but it’s looking better than it was before.”

ME370 teammates display their Rainy Days automaton.

Jae Lee races his team's robot, Rainy Days.
Rainy Days
The goal of the Rainy Days automaton was to “amaze the little kids,” Jae Lee reports about his team’s philosophy.
Teammate Connor Chu reports that they hoped to pique kids' interest in engineering. Their target audience was kids in elementary and middle school. “We just wanted something that they could see what was happening, and they could try to understand all of the mechanisms that were going on.” Plus, they made Rainy Days colorful, “So it’s attractive to them as well, and hopefully this inspires them to go into the field of engineering.”
According to teammate Elli, The hardest thing overall was the four-bar, where the lightning bolt sways back and forth. They had a big size constraint on that, and then a time constraint to finish it. She confesses that “We did that yesterday so...once we got that going, everything else fell into place. I’m happy,” she adds. “It worked out better than I thought it would.”
Lee shares a nugget of wisdom he learned through the process: “You can’t expect the hardships you will face in the course of building, and it’s all about overcoming. So, engineering, I feel like it’s an art that we think through and make our lives better.”
The team also learned a lot about teamwork through the project. “I felt like we did a really good job together,” says Elli. “We worked off of each other, I guess.”
“It was a genuine group effort,” another team member agrees.
What kind of chances did Rainy Days have? According to Connor, “If nothing breaks…If nothing breaks, then I think we have a good chance of winning.”
“I think we might take second place?” guesses another teammate. “Third place? Possibly first place? I don’t know.”
While the operator during the race had to intervene twice, because Rainy Days kept going to the left, it did win its first heat. In the championship race, it took third place. Possibly second.
The Winner!

The winners! Nik Jacobs, Indraneel Bhanap, and Ahtesham Khan

Two ME370 students prepare to race their teams' automata.
The winning walker won it in 45 seconds. It didn’t fall over, just went off course a few times, so they had to make two interventions. But while they breezed through the race, that doesn't mean they breezed through the design phase.
Nik Jacobs reports that the most challenging thing was “going through the iterations. We had to do a lot of different designs until we found one that finally worked. So it was a lot of hours working on it, mainly, and the time commitment too.”
Indraneel Bhanap reports: “I learned that CADing gears and building up a drive is pretty challenging. We had to actually CAD all the way from scratch, so we just used Creator to basically CAD the gears and find the optimal gear ratio to make sure this thing walks as fast as possible.”
According to Ahtesham Ali Khan, what was the most fun part of the project? “The end,” he explains. “The competition. Winning!”
Van der Zande expressed his thanks for the support they received from the MechSE business office, the innovation studio, the communication office, and the machine shop staff. He also acknowledged the support from AE3 and the i-design SIIP program and faculty team.
For additional design portfolios for some of Liebenberg's students, see:
Story and photographs by Elizabeth Innes, Communications Specialist, I-STEM Education Initiative.
For I-STEM articles on previous ME370 competitions, see:
- ME370 Students Find End-of-the-Semester Robot Races a Fun Learning Experience
- ME370's Drench-Your-Professor Competition Creates a Splash
- ME 370's Unique "Drench Your Professor" Competition Hones Students' Design Skills

ME370 teammates Sydney Coker, Yoni Shapiro, and Elizabeth Jimenez display their teams' automaton, RoboCat.

ME370 instructors Professors Arend van der Zande and Leon Liebenberg compare notes as to which team won the race.

The finalists prepare their robots for the championship race.
Our vision for Illinois as a land-grant institution is to foster accessible, effective STEM teaching and learning—from preschool through graduate education—at local, state, and national levels, thereby preparing a highly able citizenry and diverse STEM workforce to tackle pressing global challenges.
View I-STEM News
I-STEM Internship Opportunity
I-STEM is recruiting! We need enthusiastic undergrad and/or grad students for two roles, depending upon student strengths/interests.
Apply for internship here.









.jpg)